Motion tracking is a highly convenient feature available with most advanced video editors. As the name implies, it enables you to track any moving object in your content and then enhance it with text, images, stickers, and more. It lets you create more dynamic videos that can't but retain your audience's attention.
It's a great way to add more interest to your content, improve your branding, and create more eye-catching effects. It can even improve the quality of your content by helping you stabilize your shots.
While this feature isn't present in all editors, fortunately for you, motion tracking in Filmora is a breeze.
In this article
Learn More about Filmora Video Editor

Different Types of Motion Tracking Capabilities
You can track a moving object in your video in a few different ways. After all, not all motion-tracking solutions are made the same way.
Depending on the specific approach tools take to track moving objects, the overall tracking capabilities can be categorized into many types. The most common ones include:
- Point tracking – tracking distinct feature points and small objects such as a bird in the distance, eyes, and the like. It's a common approach used in social media filters for changing eye color, for instance;
- Planar Tracking – tracking larger flat surfaces such as roads or billboards. It's commonly used in car commercials;
- Facial tracking – tracking the movement of facial features such as eyes, eyebrows, nose, and lips. You'll see this tracking type in most beauty filters or other full-face filters on social media;
- Body tracking – tracking entire objects and people. You'll often see it in sports video highlights;
- Camera tracking – tracking the overall camera movements. It's commonly used for stabilizing shaky footage and adding 3D objects to it.
These are just some of the most common types of motion tracking you'll come across. Many more advanced types are used in niche industries.
How to Do Motion Tracking?
As a comprehensive video recorder and editor, Wondershare Filmora has an excellent selection of advanced tools and capabilities, including motion tracking. It turns the complex process of object tracking into a simple task you can complete with just a few clicks of your mouse. With more than 15 million creative assets in Wondershare Filmora, you can enrich the tracking objects with unique effects, stickers, text, and more.
- Intelligently analyze the movement and automatically track
- Pin texts to follow tracked objects
- Add mosaic to blur faces with a simple click
- Create stunning visual effects with motion graphics
- Add ingredients callouts perfectly to improve video quality
However, before you get started, you'll want to ensure that the objects in your videos can be tracked. That means they have to be nicely contrasted against the background and stay completely visible for the entirety of your video while you're using the motion tracking tool.
1. Motion Tracking with Text in Wondershare Filmora
Motion tracking with text is ideal for highlighting important points in your videos or adding more information to them. It can add more interest if you want to highlight text messages, for instance, or display the pricing of some of your products.
To use Filmora object tracking with text, you'll have to follow just a few steps:
- Install Filmora, launch it, and click the Login button in the main window to register your account;
- Select New Project and choose your video aspect ratio;
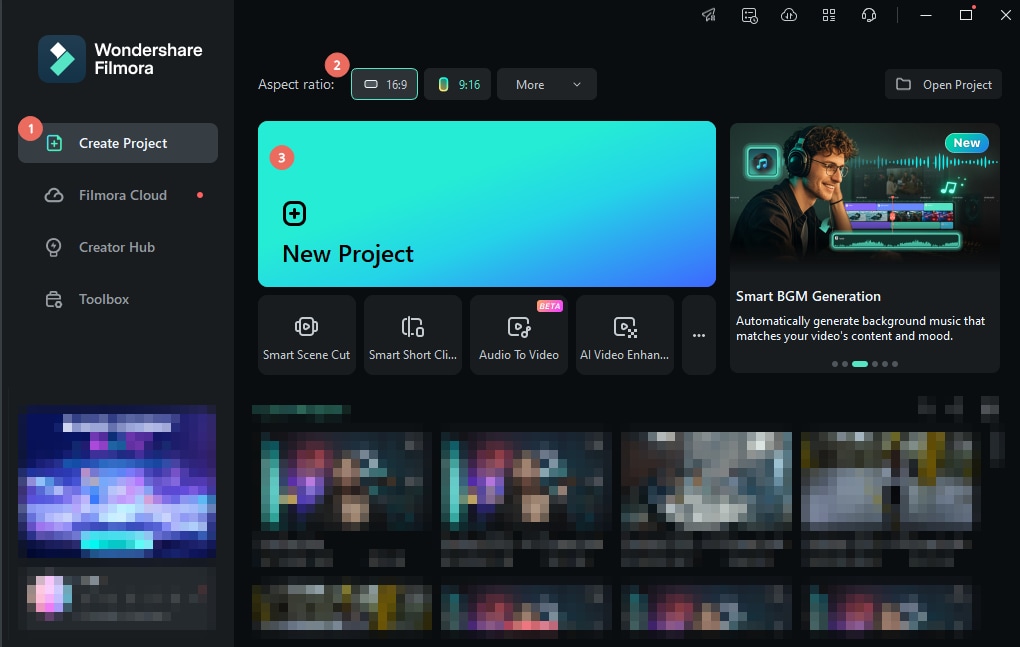
- Select File > Import Media to upload the video you want to edit, then drag it to the timeline;
- Select the video in the timeline and select Video > AI Tools from the editing menu;
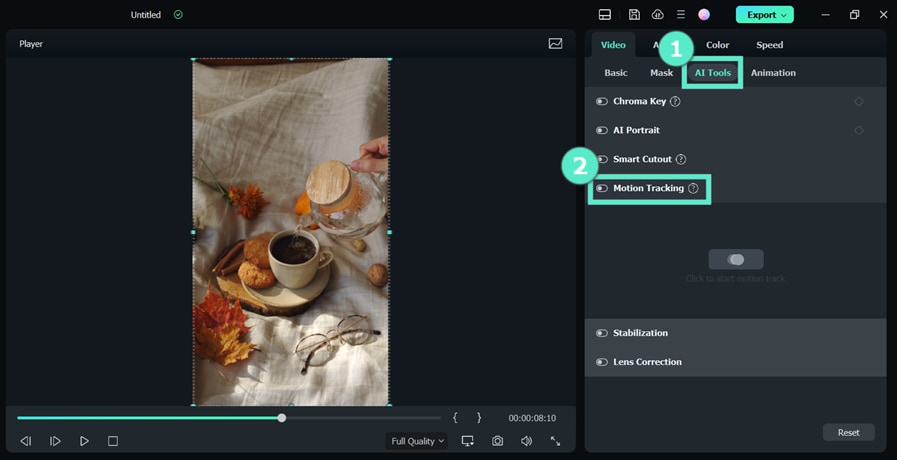
- Enable Motion Tracking and click Start Motion Track;
- To add text, click Titles, select the title style you want, and drag and drop the text above the video track in the timeline;
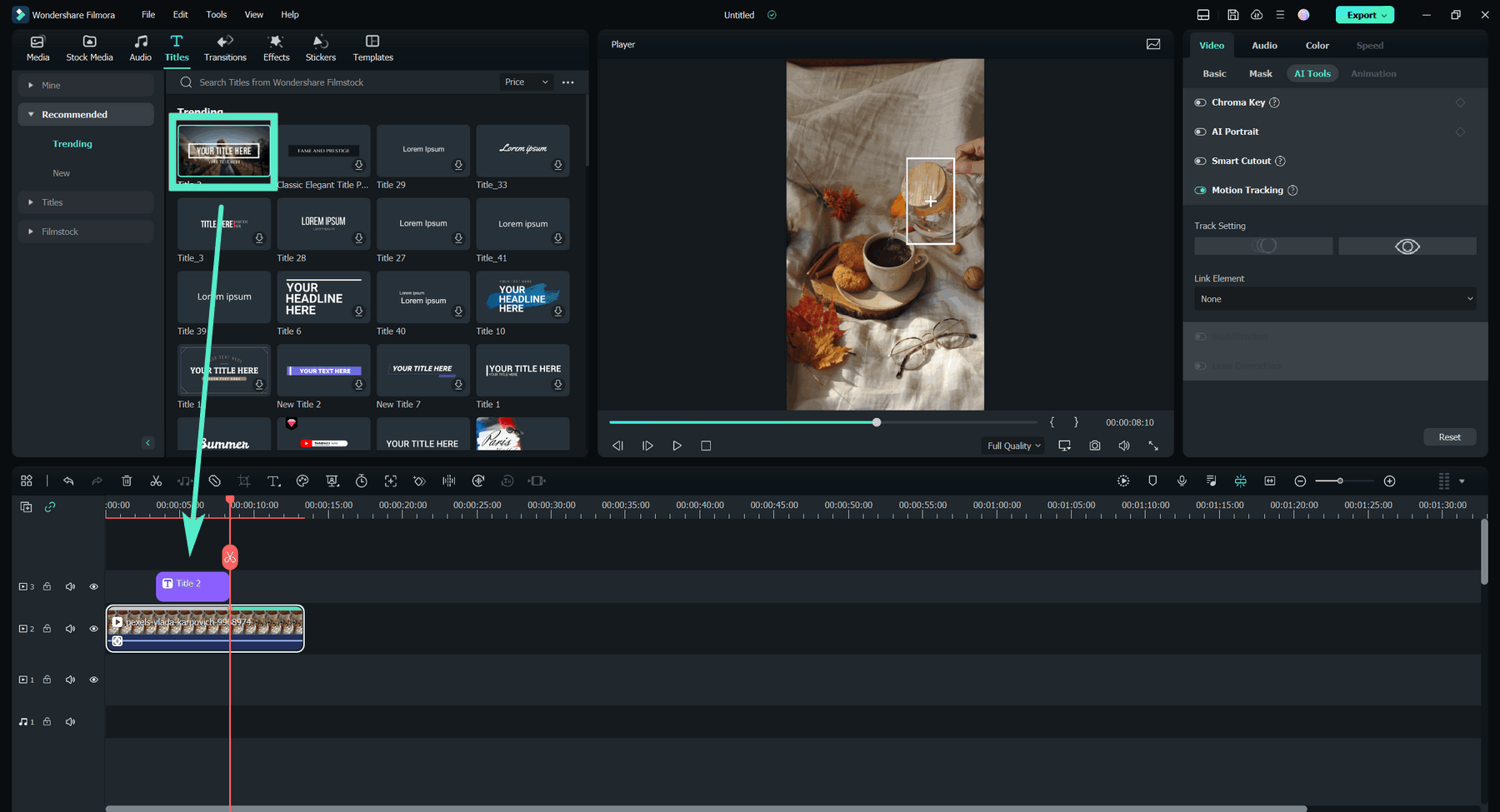
- Adjust the position, size, font, colors, and more to make your text stand out;
- Select the motion-tracking clip in the timeline, and on the right-hand side, expand the Link Element dropdown box;

- Choose the object to track in your video and ensure you encompass it entirely.
You can then preview the video to see if you're satisfied with the motion-tracking result. You can always make changes and adjustments if needed. If you like it, simply export your video and save it to your device.
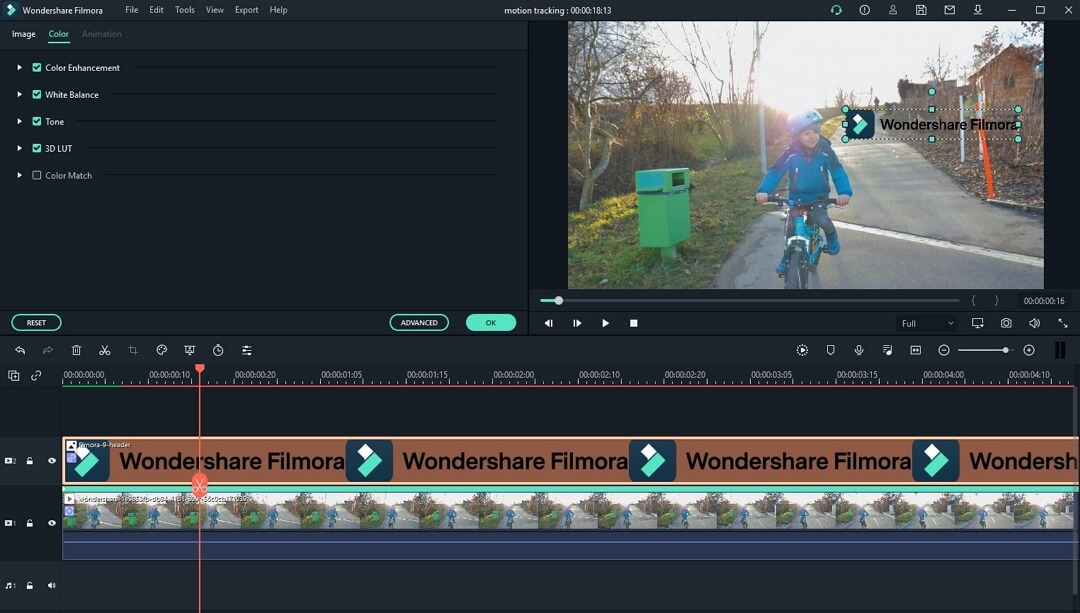
2. Motion Track with Images in Wondershare Filmora
Motion tracking with images is a great way to embed your brand logo, for instance, in your videos or add more eye-catching elements to retain your audience's attention. The process is essentially the same as motion-tracking with text in Filmora:
- Import and drag the video to the timeline.
- Click on the motion tracking button on the video editing toolbox.

- Adjust the area or objects you want to track carefully, then click start motion tracking.
- From the navigation menu on the left-hand side, select Media or Stock Media to choose an image to upload;
- Drag the image above your video in the timeline;
- Adjust the image size, orientation, and more;
- Click your video in the timeline and expand the Link Element under Motion Tracking to choose an object to track.
3. Motion Track Multiple Persons in Sporting in Wondershare Filmora
Motion tracking is especially popular in sports footage, as it allows you to highlight important details in the game. It will keep your audience on the edge of their seats and ensure they don't miss a moment of the action. But you may be curious, what should I do if you want to track multiple people in the sports game?
With Filmora, motion tracking multiple persons in sports is a piece of cake.
- Import your video and drag and drop it into the timeline;
- Duplicate the clip and place the copy directly above the original in the timeline;

- Double-click the original clip and scroll down in the menu that opens to enable Motion Tracking;
- Set the tracking box around the first element you want to track and click Start Tracking;

- Click the eyeball icon next to the duplicated clip in the timeline;
- Repeat steps 3 and 4 for the duplicated clip;
- Click the eyeball icon next to the duplicated clip again to hide it;

- Select the tracking effect you want to use and drag it to the timeline above both of your clips, directly above the element you are tracking;
- Double-click the original clip and choose the effect you're using in the drop-down menu under Motion Tracking;

- Adjust the effect;
- Drag the effect you want to use on the second element you're tracking to the timeline, placing it directly above it;

- Double-click the duplicated clip choose the effect you're using in the drop-down menu under Motion Tracking and adjust the effect;
- Preview the video and save it if you're satisfied with it.
Keep in mind that you should duplicate the original clip as many times as there are elements in it you want to track. If you want to track three people, for instance, you'll need three copies of the clip in the timeline. Tracking four people will require four copies in the timeline.
It shouldn't take you more than a few minutes to complete motion tracking with Filmora. Remember to use high-quality footage and ensure that the objects or people you want to track are completely visible throughout the clip you want to motion track.
Other Motion Tracking Ideas You Can Try
As you can see, motion tracking is highly useful in various situations. You can use it to add more text-based information to your videos, add your branding, or follow along with action footage in any sport. Other fantastic motion-tracking ideas you can try include:
- Censoring and blurring moving objects/people
- Creating animated titles and intros
- Adding details to your travel videos
- Displaying motion-tracked pricing
- Highlighting important features in real estate videos
These are just some of the options you could try. Motion tracking can be just as useful in entertaining videos for social media as it can in marketing, corporate training videos, educational tutorials, and more.
Play around with different ideas and experience first-hand just how much tracking can elevate your content.
Conclusion
When you have a sophisticated tool like Filmora by your side, tracking motion in video editing is a breeze. With an intuitive, user-friendly interface, powerful features, and excellent tracking capabilities, Wondershare Filmora will ensure that your content looks flawless – even if it's your first time shooting and editing videos by yourself.